Bouncing Robots: Enabling Robust Uncertainty-Aware Control of Minimalist Agents Through Agent-Boundary Interactions

Synchronization and consensus through proprioceptive sensing of a coupled state space! 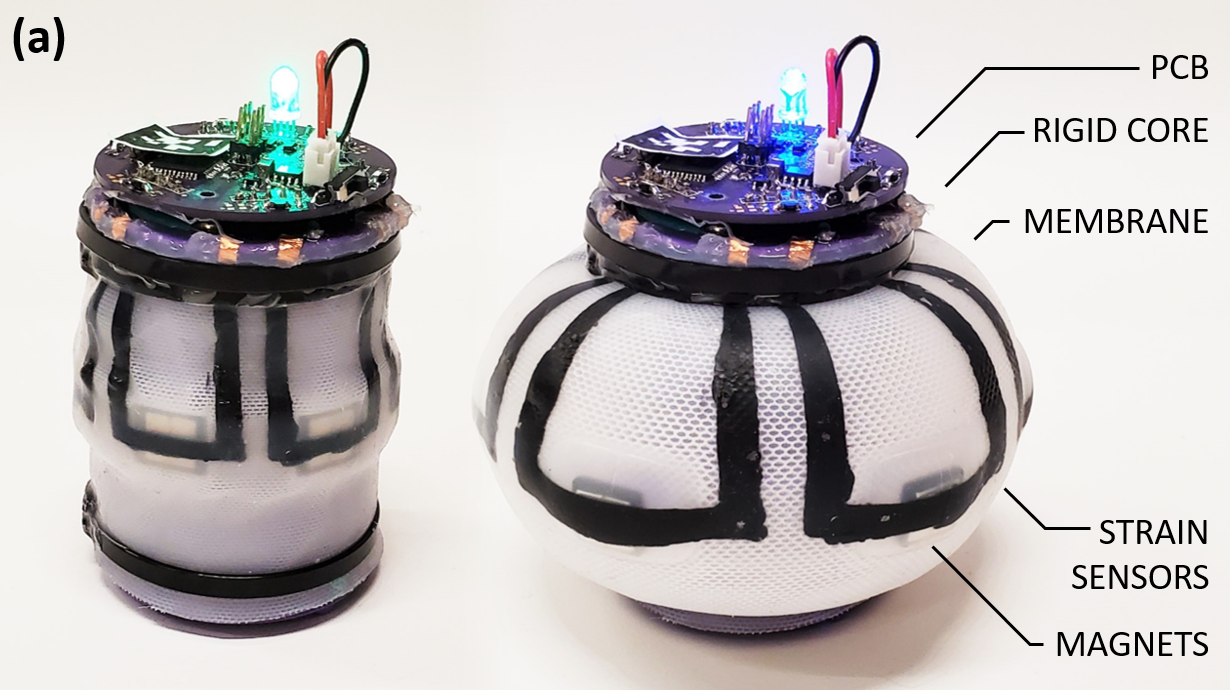
A live-coding interface for ROS with choreographic abstractions.