Bouncing Robots: Enabling Robust Uncertainty-Aware Control of Minimalist Agents Through Agent-Boundary Interactions

Synchronization and consensus through proprioceptive sensing of a coupled state space! 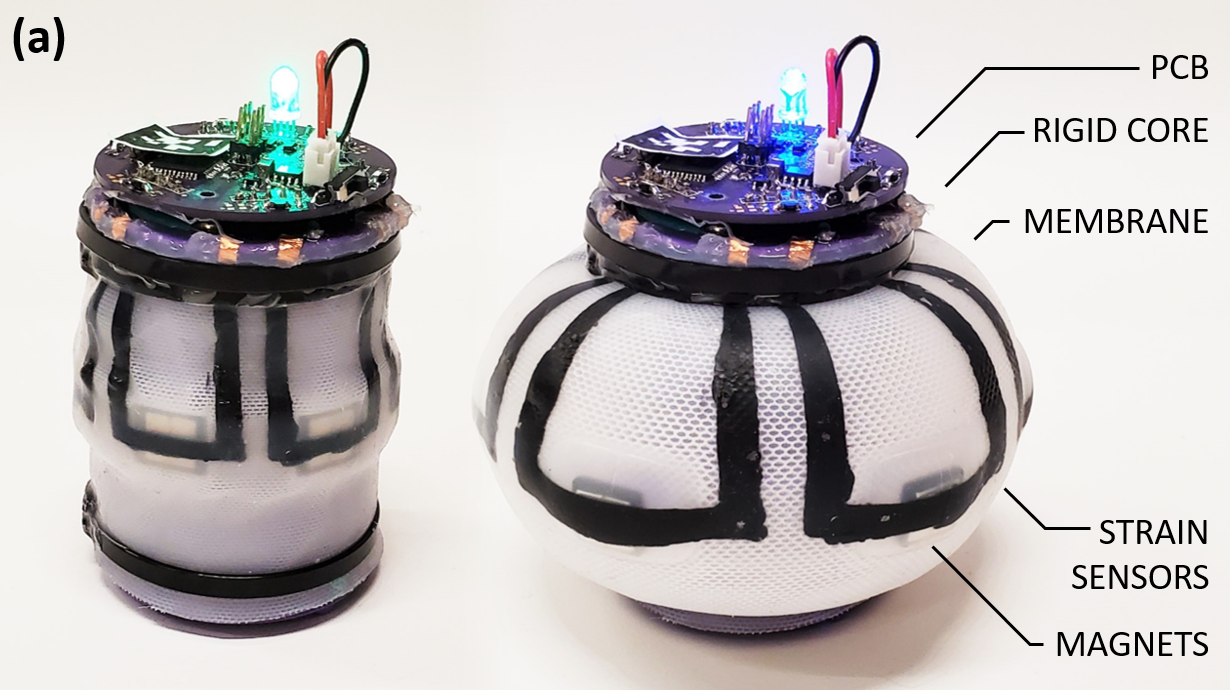
A live-coding interface for ROS with choreographic abstractions. 
Published in In the proceedings of 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2017
Use Google Scholar for full citation
Published in In the proceedings of The Workshop on Algorithmic Foundations of Robotics, 2018
Use Google Scholar for full citation
Published in In the proceedings of Proceedings of the 5th International Conference on Movement and Computing, 2018
Use Google Scholar for full citation
Published in In the proceedings of IEEE International Symposium on Multi-Robot and Multi-Agent Systems, 2019
Use Google Scholar for full citation
Published in In the proceedings of The Workshop on Algorithmic Foundations of Robotics, 2020
Use Google Scholar for full citation
Published in In the proceedings of 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020
Use Google Scholar for full citation
Published in The International Journal of Robotics Research, 2021
Use Google Scholar for full citation
Published in In the proceedings of IEEE Robotics and Automation Letters, 2021
Use Google Scholar for full citation
Published in In the proceedings of 2022 IEEE 5th International Conference on Soft Robotics (RoboSoft), 2022
Use Google Scholar for full citation
Published:
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.